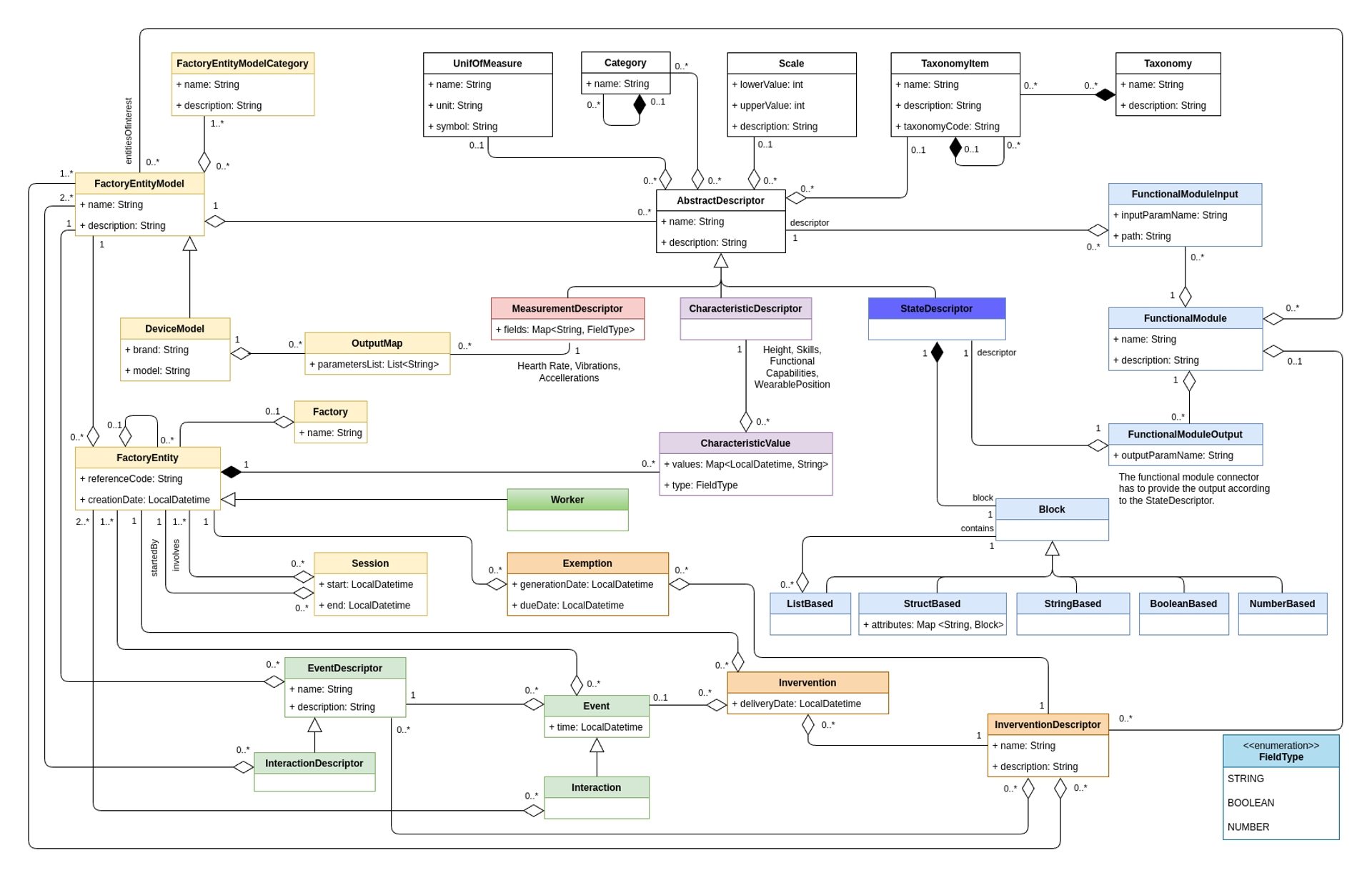
Clawdite’s reference model describes a HDT including human-centred elements but also contextual elements, relevant to
characterise the workers and the surrounding environment in a production system. The model and its implementation
aim at releasing an extensible, scalable and adaptable HDT.
The advantage for the adopters of the proposed HDT model is two-fold:
they can rely on a model built on the robustness of a scientific result;
they are provided with ready-made packages of entities to instantiate
their own HDT, by including also human-centred aspects (e.g.,
interactions, events), and software-based simulations/predictions (e.g., output of functional models predicting the state of factory entities).
There are 3 main types of data which are managed in Clawdite: measurements (dynamic data), characteristic (quasi-static
data) and states (the output of functional modules).
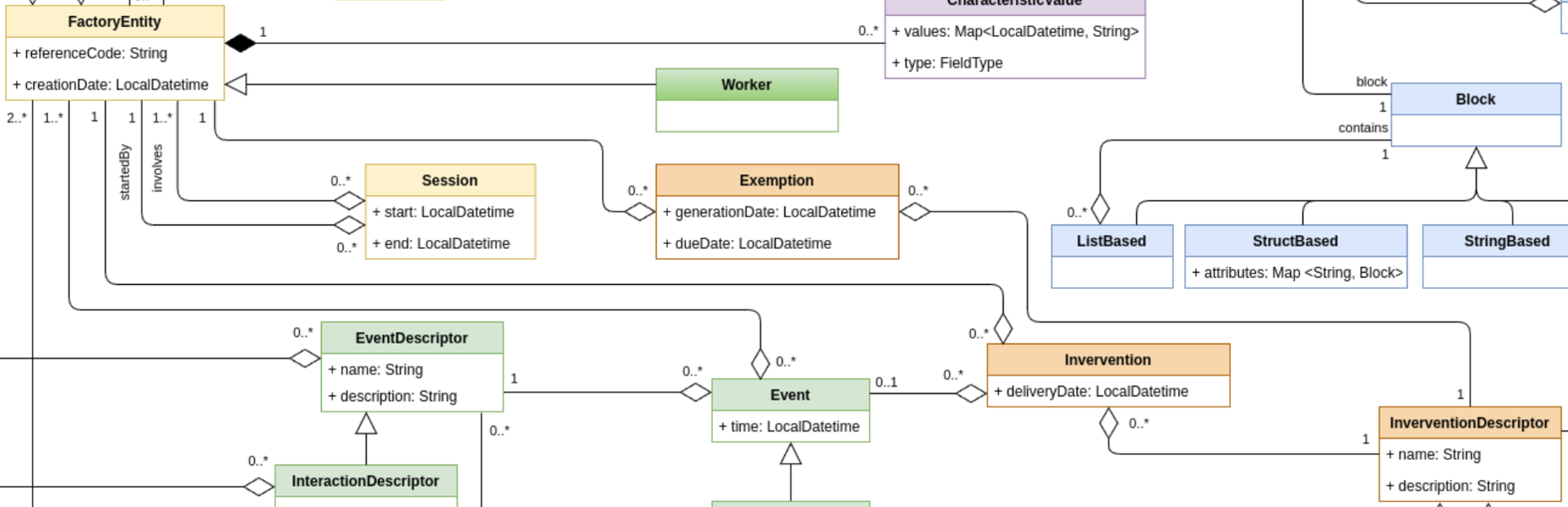
Main elements
Descriptor Elements (white, red, purple and blue boxes): contains the description and definition of all the HDT entities,
and could be
characterized by unit of measures, scales, category and taxonomies.
Factory Elements (yellow boxes): The factory and its components are described by a hierarchical structure. The
worker has a dedicated representation for enabling processing in the functional modules.
Relationship Elements (green and orange boxes): events, interactions, interventions and exemptions describe the
relationship between factory entities or workers.
State Elements (sky blue boxes): Functional modules, based on the HDT knowledge, compute and provide insights related to factory
entities and workers according to the defined block format.
1 - Characteristic Models
Define quasi-static and static data describing workers and factory things.
This set of classes allows to define quasi-static and static data
describing workers and factory things.
Clawdite model: highlight on Characteristic Models
Note that the required model attributes are indicated with a red asterisk ("*"). For mandatory
relations, refer to the multiplicity instead, as relationships are defined on one side only (i.e., a specific
relationship might be described within the other related entity).
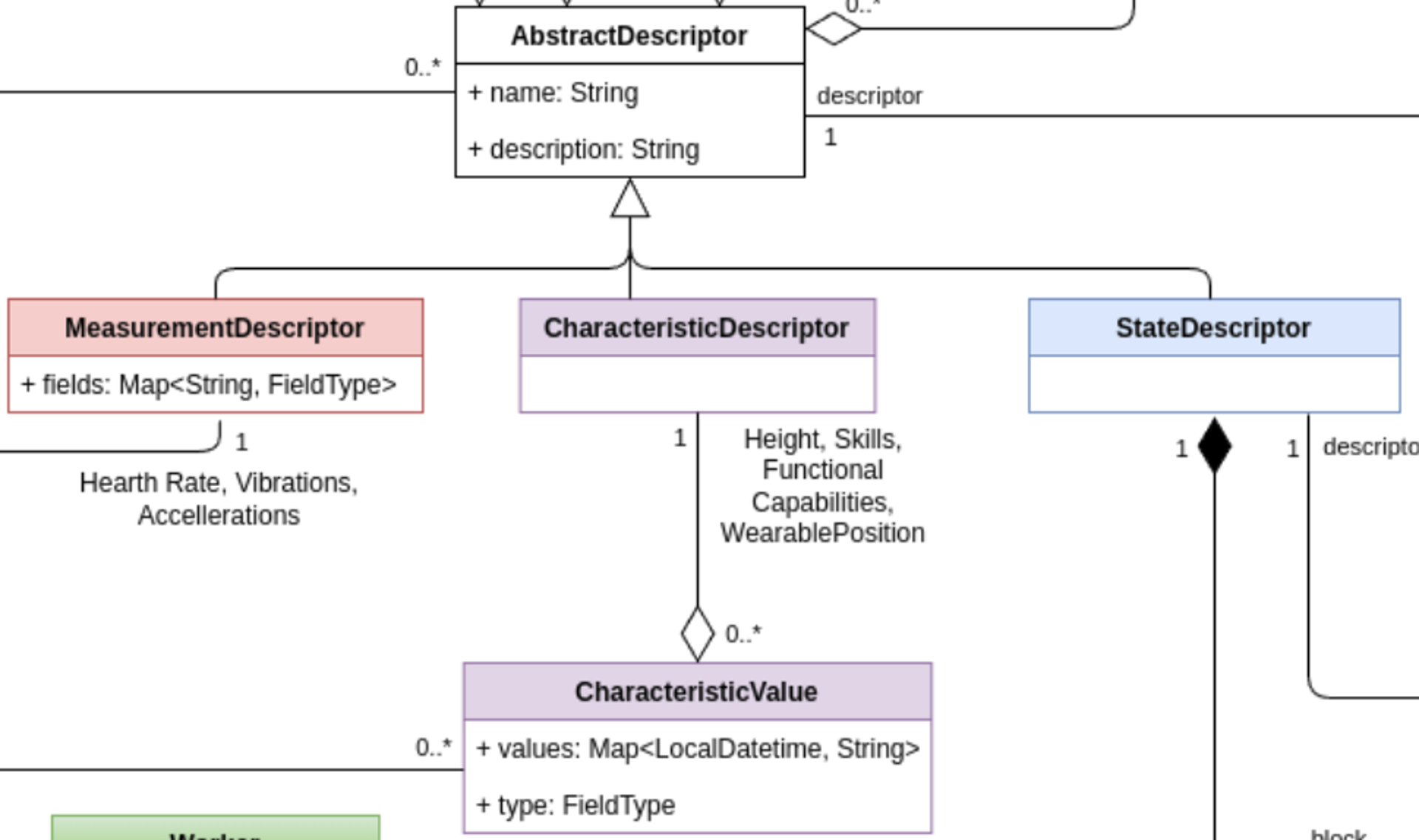
CharacteristicDescriptor
The CharacteristicDescriptor allows the extension of
AbstractDescriptor with a specific class dedicated to (quasi-)static
data. The class can include any kind of characteristics relevant for the
description of workers and other entities in the factory. For example,
the height or the set of skills may be workers’ features modelled
through the class CharacteristicDescriptor.
CharacteristicValue
The class CharacteristicValue allows the definition of the value
that characterise a CharacteristicDescriptor of a specific factory
entity, represented by the classFactoryEntity.
The CharacteristicValue is described by the following attributes:
Attribute
Type
Description
values*
Map<LocalDatetime, String>
A map with all the values the characteristic assumed over time, indexed by the acquisition timestamp. For example, the “weight” characteristic has 3 values if the worker has been weighted 3 times.
type*
TypeField
The actual type of the values listed in the values Map. It is useful to correctly parse the content of the string value.
The CharacteristicValue has the following relations:
Class
Relation type
Multiplicity
Description
CharacteristicDescriptor
Composition
1
The CharacteristicValue is always composed by a CharacteristicDescriptor, to which the value refers to.
FactoryEntity
Composition
1
The CharacteristicValue is always related to a FactoryEntity, to which the characteristic refers to.
2 - Common Descriptors
Describe properties, characteristics, measurements, dimensions and states of the entities operating in a factory.
The classes belonging to the Common Descriptors allow the description of
properties, characteristics, measurements, dimensions and states of the
many entities operating in a factory, including workers, machines,
robots and devices.
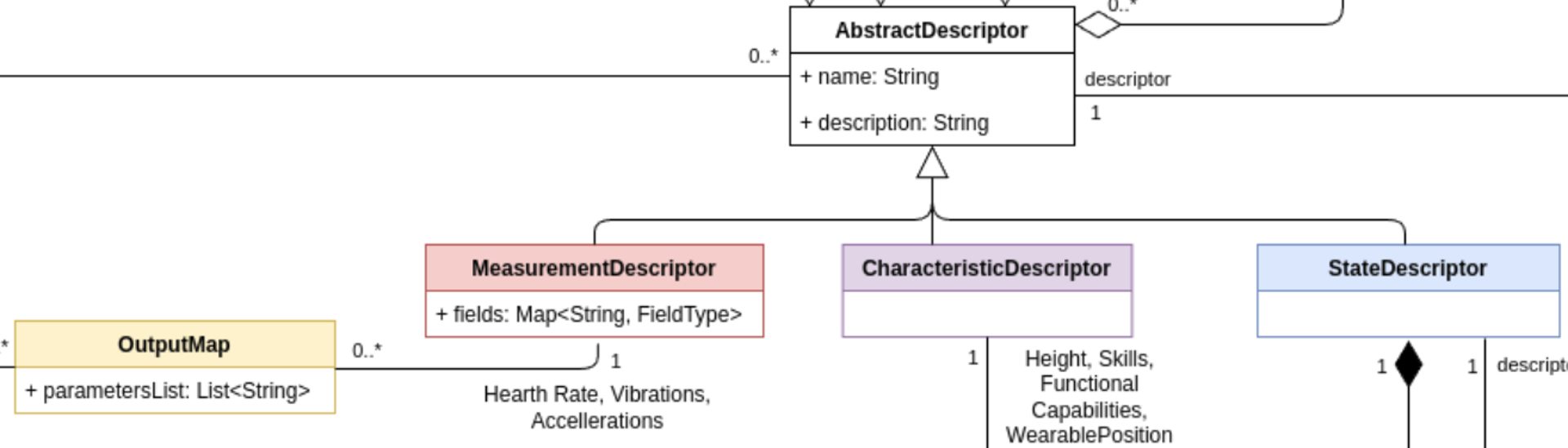
Clawdite model: highlight on Common Models
Note that the required model attributes are indicated with a red asterisk ("*"). For mandatory
relations, refer to the multiplicity instead, as relationships are defined on one side only (i.e., a specific
relationship might be described within the other related entity).
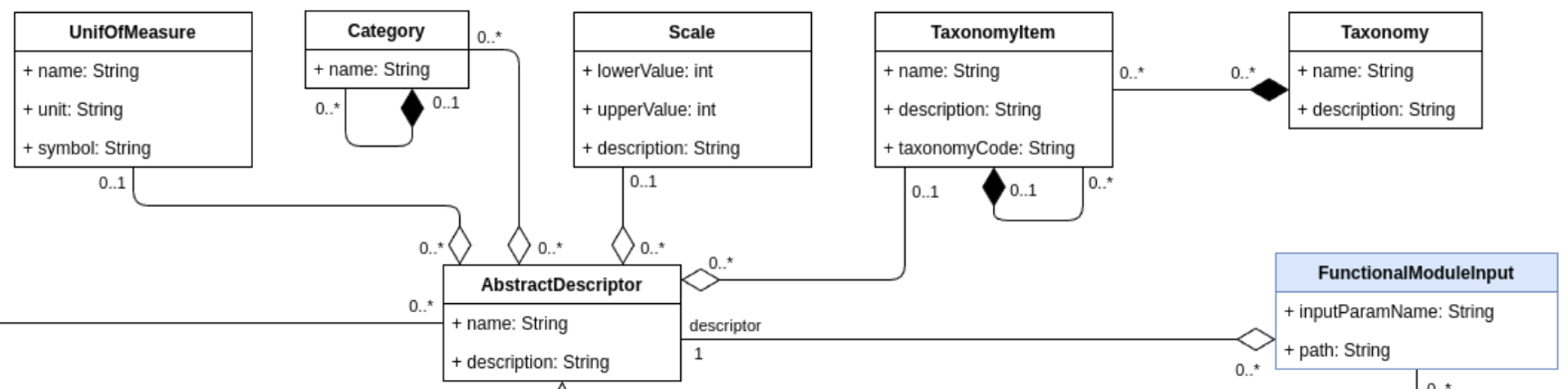
AbstractDescriptor
The AbstractDescriptor allows the description of any type of data
managed by the HDT: characteristics, measurements and states. The
descriptor can be enriched with different information such as its
UnitOfMeasure, Category, TaxonomyItem and Scale. Thanks to these
auxiliary classes, the AbstractDescriptor(s) can be of different
nature, depending on the factory thing they describe.
The AbstractDescriptor is described by the following attributes:
Attribute
Type
Description
name*
String
The name of the element the AbstractDescriptor describes.
description*
String
A Human-readable description of the AbstractDescriptor.
The AbstractDescriptor has the following relations:
Class
Relation type
Multiplicity
Description
UnitOfMeasure
Aggregation
0..1
An AbstractDescriptor can be related to at most one unit of measure.
Category
Aggregation
0..*
An AbstractDescriptor can be related to zero or more categories.
Scale
Aggregation
0..1
An AbstractDescriptor can be related to at most one scale.
TaxonomyItem
Aggregation
0..1
An AbstractDescriptor can be related to at most one taxonomy item.
FunctionalModuleInput
Association
0..*
An AbstractDescriptor can refer to zero or more input parameters of a functional module[^1].
An AbstractDescriptor can be specialized into:
CharacteristicDescriptor: it describes static or quasi-static
data characterising entities in a factory (e.g., workers, robots).
Examples of characteristics for workers are: a skill, an
anthropometric characteristic, a job position. Examples of
characteristics for machines are: weight, dimension.
StateDescriptor: it describes the state of entities in a
factory. For example, in the case of a worker, possible states are
the current task, the next task to perform, the level of perceived
fatigue, the current production performance.
MeasurementDescriptor: it describes a measurement collected from
a sensor (usually onboarded on a device), which refers to a factory
entity. For example, in the case of a worker, a
MeasurementDescriptor can describe the heart rate, measured by a
wearable device.
UnitOfMeasure
The class UnitOfMeasure has been defined to facilitate the handling
of the units of measure, which can refer to all the
AbstractDescriptor(s) (i.e., CharacteristicDescriptor(s),
StateDescriptor(s), and MeasurementDescriptor(s)). This class
allows the definition of a unit of measurement.
The UnitOfMeasure is described by the following attributes:
Attribute
Type
Description
name*
String
Name of the unit of measure
unit*
String
Unit of the unit of measure
symbol*
String
Symbol representing the unit of measure
Category
The class Category describes an AbstractDescriptor by means of
an enumeration. For example, it can be "Anthropometric
Characteristic", "Ability", "Skill", etc. It facilitates the
organization and structuring of AbstractDescriptor(s).
The Category is described by the following attributes:
Attribute
Type
Description
name*
String
The name of the category
The Category has the following relations:
Class
Relation type
Multiplicity
Description
Category
Composition
0..*
A Category can be composed by a set of sub-categories, that allows to create a hierarchical structure.
Category
Association
0..1
A Category can have at most one parent category in the hierarchical structure.
Taxonomy and TaxonomyItem
The Taxonomy class is used to classify an AbstractDescriptor
accordingly with a taxonomy (either a well-know taxonomy, like (e.g.,
O*Net or ESCO for working skills, or a private one , e.g., a taxonomy
that organises the roles in the company).
The Taxonomy is described by the following attributes:
Attribute
Type
Description
name*
String
Name of the Taxonomy.
description*
String
Human readable description of the Taxomy.
The Taxonomy has the following relations:
Class
Relation type
Multiplicity
Description
TaxonomyItem
Composition
0..*
A Taxonomy is composed by a set of TaxonomyItem(s), representing the single items belonging to the taxonomy.
A Taxonomy is composed by a set of TaxonomyItem(s), which
represent the single items that compose a taxonomy (e.g., for the skills
taxonomy, each TaxonomyItem represents a skill; in the case of the
O*Net taxonomy, “Operation Monitoring”, “Quality Control Analysis”, and
“Reading Comprehension” are TaxonomyItems).
The TaxonomyItem is described by the following attributes:
Attribute
Type
Description
name*
String
Name of the TaxonomyItem.
description*
String
Human-readable description of the TaxonomyItem.
taxonomyCode*
String
Code that represents the item in the taxonomy.
The TaxonomyItem has the following relations:
Class
Relation type
Multiplicity
Description
TaxonomyItem
Composition
0..*
A TaxonomyItem can be composed by a set of sub-items, creating a hierarchical structure.
TaxonomyItem
Association
0..1
A TaxonomyItem may have one parent item in the hierarchical structure.
Scale
The Scale class is used to provide an AbstractDescriptor with a
scale that narrows its possible values, making it easier to assign,
understand, and interpret the measured value in a meaningful way.
The Scale is described by the following attributes:
Attribute
Type
Description
lowerValue*
Int
The lowest value that can be assigned to the scale.
upperValue*
Int
The highest value that can be assigned to the scale.
description*
String
Human readable description of the Scale. If the scale refers to qualitative/subjective values, it has to include a description of the assignment methodology.
3 - Event and Interaction Models
Define the events and interactions between entities in the factory.
This section contains classes that are relevant for defining interactions between
entities in the factory.
Clawdite model: highlight on Interaction and Event Models
Note that the required model attributes are indicated with a red asterisk ("*"). For mandatory
relations, refer to the multiplicity instead, as relationships are defined on one side only (i.e., a specific
relationship might be described within the other related entity).
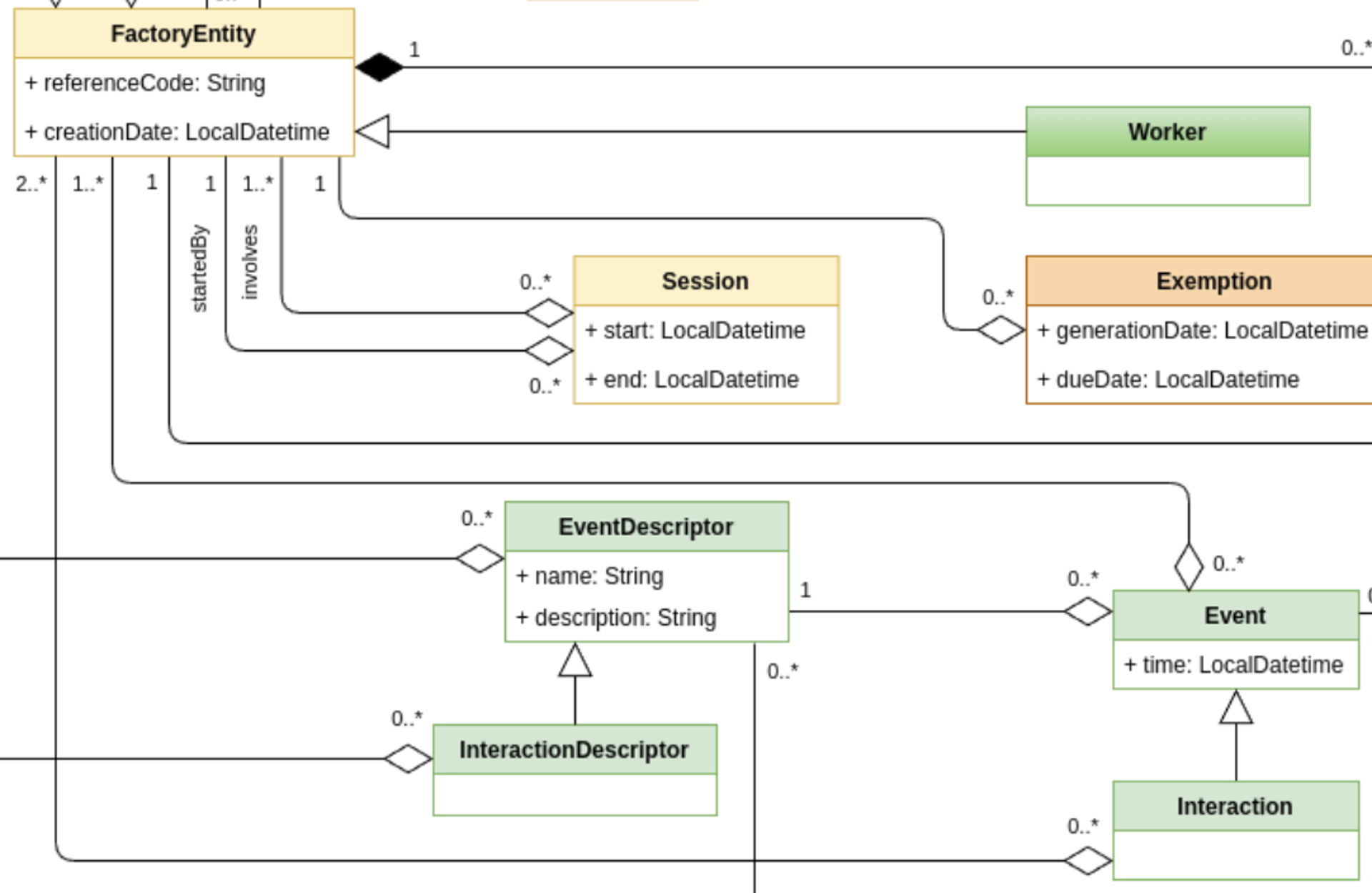
EventDescriptor and InteractionDescriptor
The EventDescriptor class describes the events that change the HDT
status, evolving any of its entities or attributes. An event is related to a single entity. Events involving multiple
entities are represented through Interaction(s).
The EventDescriptor is described by the following attributes:
Attribute
Type
Description
name*
String
Name of the EventDescriptor.
description*
String
Human readable description of the EventDescriptor.
The EventDescriptor has the following relations:
Class
Relation type
Multiplicity
Description
FactoryEntityModel
Aggregation
1
The FactoryEntityModel that is involved in the event.
The InteractionDescriptor class specifies the EventDescriptor,
requiring the event being an interaction between two or more
FactoryEntityModel(s) (e.g., a collision between a robot and a
worker, a worker that loads a pallet on an AGV, etc.).
The InteractionDescriptor has the following relations:
Class
Relation type
Multiplicity
Description
FactoryEntityModel
Aggregation
2..*
The FactoryEntityModel(s) that are involved in the interaction.
For example, a InteractionDescriptor can be “Impact between cobot
and worker”, which aggregate the FactoryEntityModel(s) “Assembly
Worker” and “Cobot UR10”.
Event and Interaction
The Event class defines an event described by an
EventDescriptor.
The Event is described by the following attributes:
Attribute
Type
Description
time *
LocalDatetime
Date and time when the interaction event occurs.
The Event class has the following relations:
Class
Relation type
Multiplicity
Description
FactoryEntity
Aggregation
1..*
An Event aggregates FactoryEntity(s) and those things have been involved in the event.
As per the EventDescriptor class, also the Event class is
extended by the Interaction class, which requires the event to
involve at least two FactoryEntity(s). Indeed, the Interaction class
has the following relations:
Class
Relation type
Multiplicity
Description
FactoryEntity
Aggregation
2..*
An aggregates FactoryEntity(s) and those things have been involved in the event.
4 - Intervention Models
Define interventions to orchestrate the production system and the things acting within it.
This set of classes allows to describe interventions to orchestrate the
production system and the things acting within it, optimising
performance and/or increasing workers’ wellbeing.
Clawdite model: highlight on Intervention Models
Note that the required model attributes are indicated with a red asterisk ("*"). For mandatory
relations, refer to the multiplicity instead, as relationships are defined on one side only (i.e., a specific
relationship might be described within the other related entity).
InterventionDescriptor and Intervention
The class InterventionDescriptor allows the definition of
interventions that can be triggered to orchestrate the production system
and its entities (i.e. the tasks to perform). Examples of intervention descriptors are: to deliver a
notification to the operator, to set-up and activate a robot
part-program, to turn-on a tool or to adjust the speed of a spindle.
Interventions could be fired by the FunctionalModule(s) in charge of
decision-making, defining workers and the things of the factory to be
triggered.
The InterventionDescriptor is described by the following attributes:
Attribute
Type
Description
name*
String
Name of the FunctionalModule.
description*
String
Human readable description of the FunctionalModule.
The InterventionDescriptor has the following relations:
Class
Relation type
Multiplicity
Description
FactoryEntityModel
Composition
1..*
Relation with factory entity models affected by the intervention.
EventDescriptor
Composition
0..*
The EventDescriptor of the event that is triggered by the Intervention.
The class Intervention describes a triggered and actuated
intervention.
The Intervention is described by the following attributes:
Attribute
Type
Description
deliveryDate*
datetime
Date and time when the intervention has been delivered to the factory entity.
The Intervention class has the following relations:
Class
Relation type
Multiplicity
Description
FactoryEntity
Composition
1..1
The FactoryEntity targeted by the Intervention.
Event
Composition
1..1
The Event triggered by the Intervention.
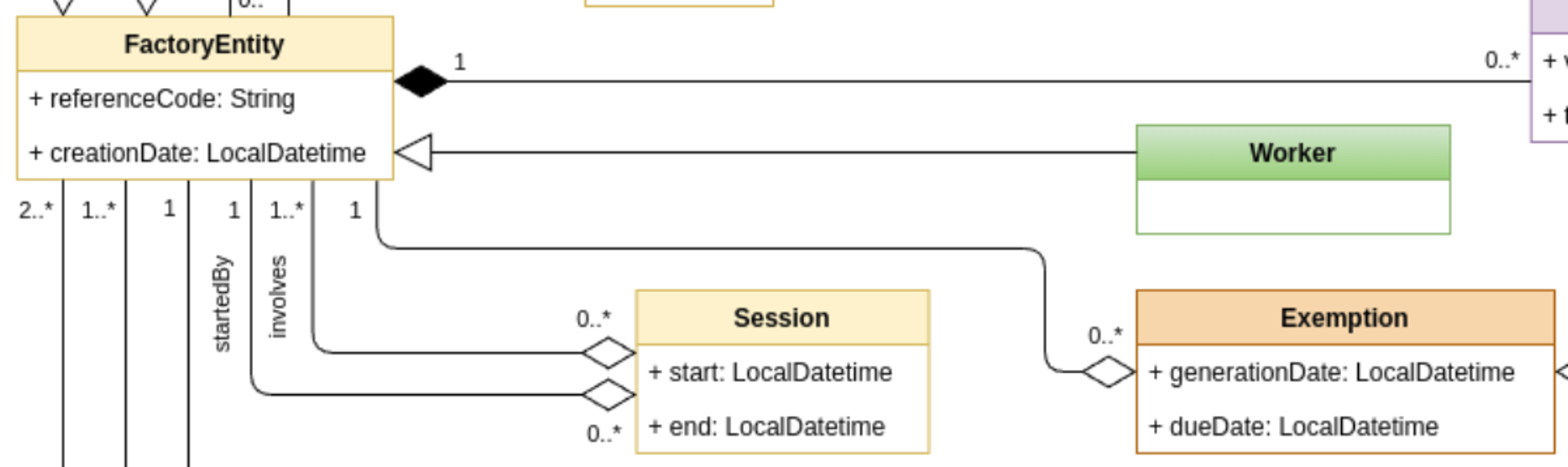
Exemption
The class Exemption allows to specify which FactoryEntity(ies) are exempted from a specific
InterventionDescriptor (i.e. task). An Exemption is related to a single entity-task tuple, in order to specify exemptions related to multiple entities for the same task, or to assign multiple task exemptions to the same entity, it
is needed to create different Exemption(s).
The Exemption is described by the following attributes:
Attribute
Type
Description
generationDate
LocalDateTime
Date from which is Exemption is valid.
dueDate
LocalDateTime
Date on which the Exemption expires.
The Exemption has the following relations:
Class
Relation type
Multiplicity
Description
FactoryEntity
Composition
1
Relation with the FactoryEntity subject to the Exemption.
InterventionDescriptor
Composition
1
The InterventionDescriptor associated to the Exemption.
5 - Measurement Models
Define measurements and data collected from workers and things in the factory.
This set of classes allows describing measurements and data collected
from workers and things in the factory.
Clawdite model: highlight on Measurement Models
Note that the required model attributes are indicated with a red asterisk ("*"). For mandatory
relations, refer to the multiplicity instead, as relationships are defined on one side only (i.e., a specific
relationship might be described within the other related entity).
MeasurementDescriptor
The MeasurementDescriptor extends the AbstractDescriptor with a
specific class dedicated to dynamic data, streamed by wearable devices,
sensors and PLCs. These can include any kind of relevant data collected
from factory entities. For example, hearth rate, galvanic skin response,
vibrations, accelerations, temperature could be modelled through the
class MeasurementDescriptor.
The MeasurementDescriptor is composed by the following attributes:
Attribute
Type
Description
fields*
Map<String, FieldType>
This map relates the field data type with the field itself. For example, acceleration is composed by three fields: accX, accY and accZ. This attribute specifies the type of each field.
6 - Production System Models
Define entities acting in the factory and collecting measurements to feed the HDT.
This set of classes allows the definition of entities acting in the
factory and collecting measurements to feed the HDT.
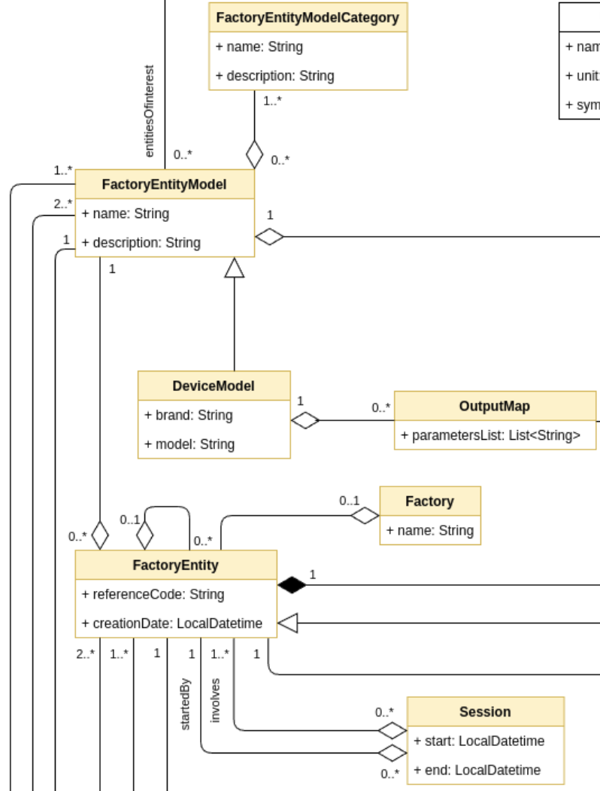
Clawdite model: highlight on Production System Models
Note that the required model attributes are indicated with a red asterisk ("*"). For mandatory
relations, refer to the multiplicity instead, as relationships are defined on one side only (i.e., a specific
relationship might be described within the other related entity).
FactoryEntityModel
The FactoryEntityModel class describes the digital counterpart of
the entities populating and thus acting in the factories such as robots,
machines, pallets, workers, etc. . Characteristics, states, measurements
and interactions of such entity models have to be included in the HDT.
It is important to remark that the FactoryEntityModel is a generic
representation of a factory entity, not its specific instance. For
example, a FactoryEntityModel could be “assembly operator” or “Cobot
UR10”. Specific instances of these models can be described in the
Worker class, in case of a worker, and in the FactoryEntity in
case of any other type of entity.
The FactoryEntityModel is described by the following attributes:
Attribute
Type
Description
name*
String
Name of the FactoryEntityModel.
description*
String
Human readable description of the FactoryEntityModel.
The FactoryEntityModel has the following relations:
Class
Relation type
Multiplicity
Description
AbstractDescriptor
Composition
0..*
A FactoryEntityModel is composed by a set of AbstractDescriptor(s). They represent characteristics, measurements and states that have to be represented in the HDT for describing the FactoryEntityModel.
FactoryEntityModelCategory
Composition
1..*
A FactoryEntityModel has at least one FactoryEntityModelCategory.
For example, a FactoryEntityModel could be Cobot UR10 which could be composed by the following AbstractDescriptor(s):
CharactersticDescriptor: reach, number of joints, installation date, etc.
StateDescriptor: availability, current end-effector, current task, next task to be performed, etc.
MeasurementDescriptor: joints position, workbench vibration, etc.
FactoryEntityModelCategory
The FactoryEntityModelCategory specifies the category of a
FactoryEntityModel. In this way, it is possible to organize
FactoryEntityModel(s). For example, the FactoryEntityModel “wearable
device” may be assigned to two different categories: “wrist band” and
“chest band”.
The FactoryEntityModelCategory is described by the following
attributes:
Attribute
Type
Description
name*
String
Name of the FactoryEntityModelCategory.
description*
String
Human readable description of the FactoryEntityModelCategory.
DeviceModel
The DeviceModel is used to describe any device that generates
measurements, including sensors, machines and wearables. Exactly like
the FactoryEntityModel, the DeviceModel is a generic description
of a device (it is not a specific instance). The need for this class
arises from the fact that device models (e.g., vibration sensor SW-420,
Siemens Simatic S7-1200), including wearables (e.g. Garmin Instinct)
collect measurements in different ways and with different data
structures. The DeviceModel class allows a particular device model
to be described, enabling the mapping of physical device outputs to one
or more MeasurementDescriptor(s) or StateDescriptor(s) in the
HDT, minimizing the overhead of connecting devices of the same model.
The DeviceModel is described by the following attributes:
Attribute
Type
Description
brand*
String
Name of the device brand.
model*
String
Name of the device model.
The DeviceModel has the following relations:
Class
Relation type
Multiplicity
Description
OutputMap
Aggregation
0..*
This is the relation between the DeviceModel and the OutputMap that allows the HDT to translate and use as input data collected from a device to feed a MeasurementDescriptor.
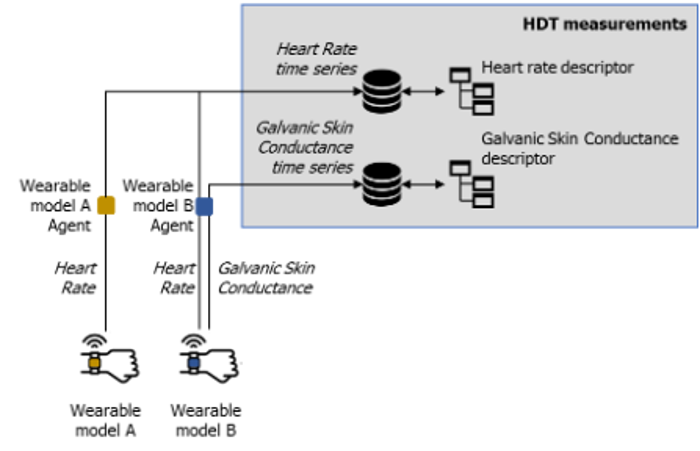
OutputMap
The OutputMap maps a physical parameter measured by a device with
the field described by a MeasurementDescriptor, making the
descriptor independent from the device models. A DeviceModel can
produce different types of measurements (e.g., heart rate, blood
pressure, etc.). This measurement must be created and described in the
HDT using MeasurementDescriptor(s) so that other components can
interact with it. Therefore, the stream of a device data must be mapped
and connected to a MeasurementDescriptor. Moreover, different
DeviceModel(s) may feed the same MeasurementDescriptor. For
example, two wearable device models (e.g., Garmin Instinct and Polar
OH1), may provide the same measurement (e.g., hearth rate). However, a
user wants to have a unique representation of that measurement in the
HDT. Therefore, a unique MeasurementDescriptor is created in the
HDT, and each wearable model has an OutputMap, mapping the different
outputs of the wearables to the same MeasurementDescriptor.
Different devices, collecting same physiological, feeding the same measurement
The OutputMap is described by the following attributes:
Attribute
Type
Description
parameterList*
List<String>
An ordered sequence of device parameters. This sequence must be met when writing actual measurements to the HDT. For example, if a device produces 3 values for the accelerometer (x, y, z), some valid parameterLists are [x, y, z], [z, x, y], [x, y] (if the z value is not relevant for the HDT).
The OutputMap has the following relations:
Class
Relation type
Multiplicity
Description
MeasurementDescriptor
Composition
1
This is the relation that allows the HDT to map and use as input data collected from a device to feed a MeasurementDescriptor.
FactoryEntity
The FactoryEntity class allows the creation of instances of entities
in a factory described through a FactoryEntityModel. The
FactoryEntity is a specific entity that populates the factory.
The FactoryEntity is described by the following attributes:
Attribute
Type
Description
referenceCode
String
The code used to refer to the digital entity in the real world. For devices, it could be a serial number, a mac address, or any other label. For workers, it can be a registration number, a badge number, or other anonymous (or anonymized) codes.
creationDate*
LocalDatetime
The date when the instance has been added to the HDT.
The FactoryEntity has the following relations:
Class
Relation type
Multiplicity
Description
FactoryEntiityModel
Composition
1
The specific FactoryEntityModel associated to the entity.
FactoryEntiity
Association
0..1
A FactoryEntity can have at most one parent entity in the hierarchical structure.
FactoryEntiity
Composition
0..*
A FactoryEntity can be composed by a set of sub-entities, that allows to create a hierarchical structure.
Factory
Association
0..1
The Factory to which the entity is associated.
Factory
The Factory class allows the definition of a factory where the
FactoryEntity(s) act and operate, being able to have HDT
representing entities in different production systems.
The Factory is described by the following attributes:
Attribute
Type
Description
name*
String
Name of the Factory.
Session
The Session class allows data collection or working sessions to be
defined; in such a way, the HDT tracks exactly when a particular
FactoryEntity performs a specific activity, and to match
Event(s), Interaction(s), and Intervention(s) with specific
time slots.
The Session is composed by the following attributes:
Attribute
Type
Description
start*
LocalDatetime
Date and time when the session starts.
end
LocalDatetime
Date and time when the session ends.
The Session has the following relations:
Class
Relation type
Multiplicity
Description
FactoryEntiity
Composition
1
The FactoryEntity who started the Session.
FactoryEntiity
Composition
1..*
The FactoryEntity who are involved in the Session.
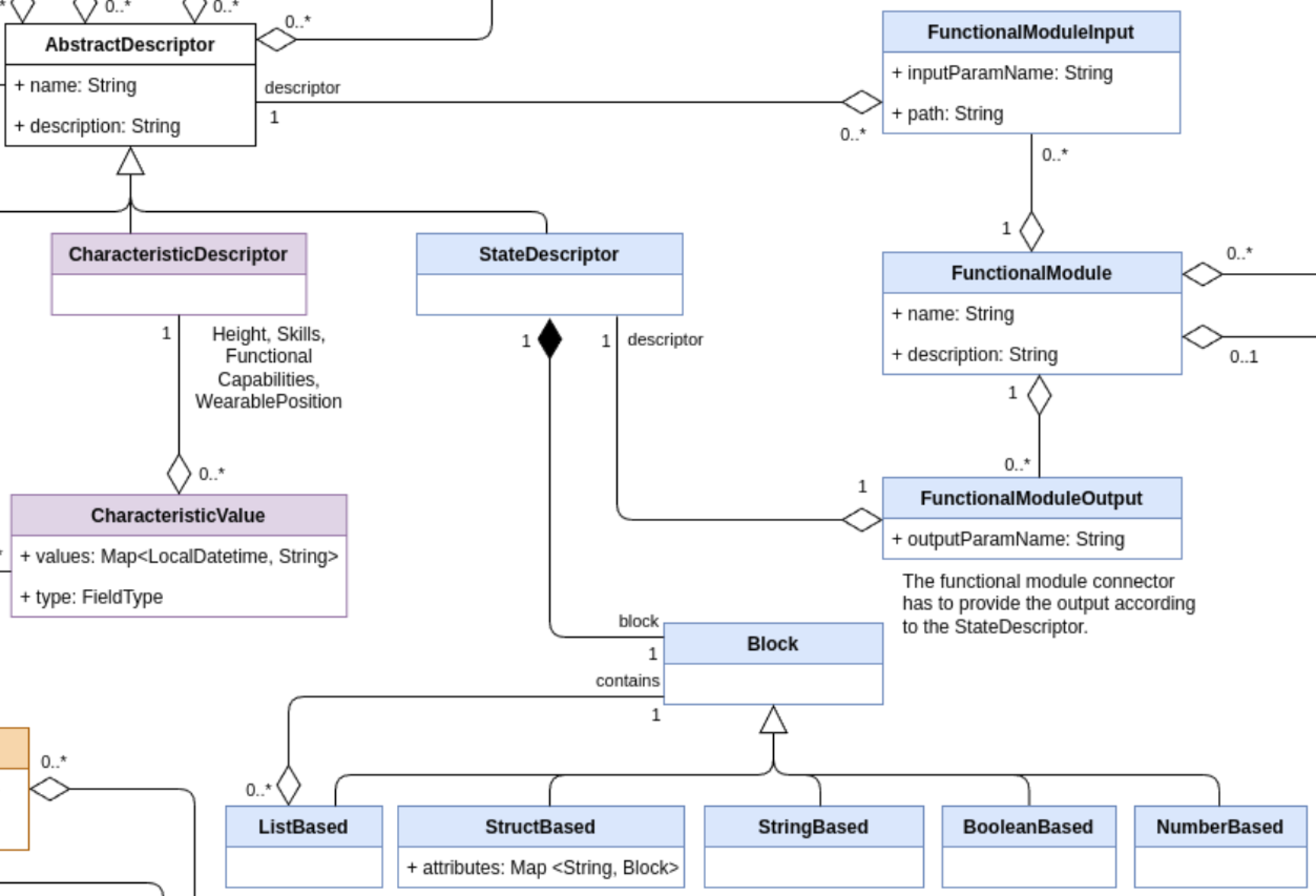
7 - State Models
Define states computed by functional modules by elaborating entities and attributes, making the HDT capable of simulating, predicting, reasoning, and deciding.
This set of classes aims at describing states characterizing factory
entities. States are computed by functional modules, which describe all
those computational processes that can elaborate entities and
attributes, making the HDT capable of simulating, predicting, reasoning,
and deciding. The class FunctionalModule aggregates one or more
events that can be used to update the state of the HDT depending on the
result of the computation performed. Inputs are defined and mapped
through the class FunctionalModuleInput to the entities needed by
the model (e.g., physiological parameters and worker conditions for
detecting fatigue level). Internally, functional models can employ any
mean of data processing and calculation such as mathematical functions,
machine learning, or empirical models. These, if necessary, can be
stored as binary blobs and annotated to be managed correctly.
Clawdite model: highlight on State Models
Note that the required model attributes are indicated with a red asterisk ("*"). For mandatory
relations, refer to the multiplicity instead, as relationships are defined on one side only (i.e., a specific
relationship might be described within the other related entity).
StateDescriptor
The StateDescriptor extends the AbstractDescriptor with a
specific class dedicated to the description of states of both workers
and things in the factory. These states are computed by the
FunctionalModule(s). The StateDescriptor can describe the state
of a cobot in the form of the current pose, current part program, or the
position or the fatigue level of a worker.
The StateDescriptor has the following relations:
Class
Relation type
Multiplicity
Description
Block
Aggregation
1
The output schema description provided by a module.
FunctionalModuleOutput
Aggregation
1
The output data from the FunctionalModule.
FunctionalModule
The FunctionalModule class allows to describe any model that
generates states. A model could be an AI algorithm or a simple data
processor. The FunctionalModule defines a model that acts in the HDT
and produces outputs that feed the HDT state. An example of
FunctionalModule is the Fatigue Monitoring System or an Activity
Detection Module.
The FunctionalModule is described by the following attributes:
Attribute
Type
Description
name*
String
Name of the FunctionalModule.
description*
String
Human readable description of the FunctionalModule.
The FunctionalModule has the following relations:
Class
Relation type
Multiplicity
Description
FunctionalModuleInput
Composition
0..*
This is the relation between FunctionalModule expected inputs, and HDT available AbstractDescriptors. This relation allows the HDT to translate the module input parameter names to actual MeasurementDescriptor(s), CharacteristicDescriptor(s) and StateDescriptor(s).
FunctionalModuleOutput
Composition
0..*
This is the relation that allows the HDT to map to FunctionalModule’s outputs to a StateDescriptor.
InterventionDescriptor
Composition
0..*
This is the relation between the FunctionalModules supporting the decision making and the InterventionDescriptor, that allows to trigger interventions on the production system.
FactoryEntityModel
Composition
0..*
This relation specifies the factory entities that are relevant for the FunctionalModule, i.e., that must be monitored by the FunctionalModule. For example, the Fatigue Monitor System is interested in monitoring new workers.
FunctionalModuleInput
The FunctionaModelInput supports the mapping that relates an
AbstractDescriptor modelled into the HDT to an input that feeds the
FunctionalModule. It allows the HDT to integrate modules that
require input data with different structures than those described by
MeasurementDescriptor(s), CharacteristicDescriptor(s) and
StateDescriptor(s).
The FunctionalModule is described by the following attributes:
Attribute
Type
Description
inputParamName*
String
The FunctionalModule reference name of the input parameter
path*
String
The HDT reference name of the input parameter
FunctionalModuleOutput
The FunctionalModulOutput supports the mapping that relates the
outputs of a FunctionalModule and the related StateDescriptor(s)
into the HDT. It allows the HDT to integrate modules that provide output
data with different structures than those described as a
StateDescriptor.
The FunctionalModule is described by the following attributes:
Attribute
Type
Description
outputParamName*
String
The HDT reference name of the result
Block
The Block class is a utility entity that enables the formalization
of the schema that describes the StateDescriptor(s), thus allowing
the HDT to be aware of the data format. This helps
FunctionalModule’s output validation against the schema, and also to
translate/map an output schema of a module to an input schema of another
module.
The Block structure describes every object's schema which contains
coherent lists (a list that comprises elements of the same kind). For
example, the location of different workers could be represented as
follow (for simplicity the JSON format is used):
This example of output could be easily described through the use of the
Block class:
StructBased workerBlock:
“id” → NumberBased
“x” → NumberBased
“y” → NumberBased
“pose” → StringBased
ListBased workersListBlock describe a list of workerBlock:
StructBased overallBlock describes the whole object as it follows:
“id” → NumberBased
“workers” → workersListBlock
ListBased
The ListBased class inherits from Block and describes a list
that contains elements structured as a Block, enabling the
definition of a coherent list that comprises data of the same type.
StructBased
The StructBased class inherits from Block and describes a
structure of Block(s). It can be seen as a dictionary with string
keys and Block values.
The StructBased is described by the following attributes:
Attribute
Type
Description
attributes*
Map<String, Block>
The mapping of a String key to a Block value.
StringBased
The StringBased block describes a simple attribute of type string,
which can be part of a StructBased or ListBased.
NumberBased
The NumberBased block describes a simple numerical attribute, which
can be part of a StructBased or ListBased.
BooleanBased
The BooleanBased block describes a simple bo attribute, which can be
part of a StructBased or ListBased.
8 - Worker Models
Define worker instances.
This section contains classes that are relevant for defining worker
instances.
Clawdite model: highlight on Worker Models
Worker
The class Worker allows the definition of worker instances. This
class is used to represent a specific worker in the production system.
As of today, the class just inherits its parent’s properties and
relationships, but it’s worth be noted that having a dedicated class
enables a fine-grained management of the HDT entities by the HDT user.
For example, measurements related to workers may require additional data
preserving rules (e.g., when collecting biometrics data); moreover,
workers can be “anonymized” within the HDT (e.g., the referenceCode may
be missing or an anonymous code), while this operation is meaningless
for other factory entities in almost all the cases. Moreover, the
behaviour of factory entities is in general predictable with
well-established models, while the behaviour of workers may be
unpredictable (due to non-measurable features, like emotions), and this
point plays a crucial role in an HDT. For this reason, it is important
to distinguish workers from other nonhuman factory entities.